Recent Research Projects and Talks
Intelligent Autonomous Systems
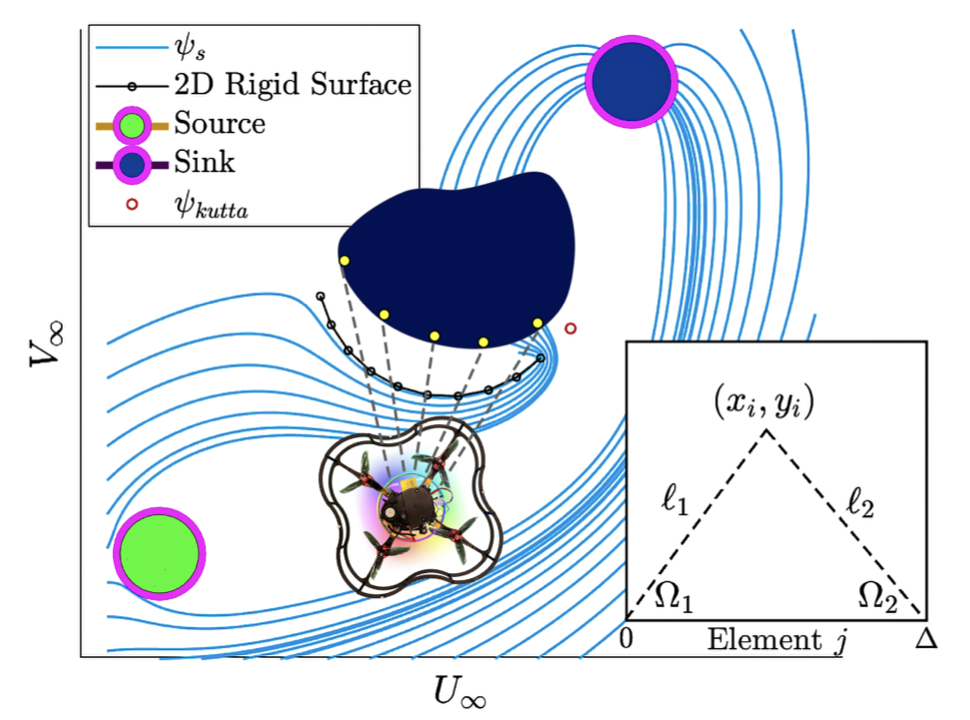
Project: Stream Function-Based Navigation for Complex Quadcopter Obstacle Avoidance
Paper: https://arxiv.org/abs/2507.06787
This project proposed a novel stream function-based navigational control system for obstacle avoidance, where obstacles are represented as two-dimensional (2D) rigid surfaces in inviscid, incompressible flows. The approach leverages the vortex panel method (VPM) and incorporates safety margins to control the stream function and flow properties around virtual surfaces, enabling navigation in complex, partially observed environments using real-time sensing. To address the limitations of the VPM in managing relative distance and avoiding rapidly accelerating obstacles at close proximity, the system integrates a model predictive controller (MPC) based on higher-order control barrier functions (HOCBF). This integration incorporates VPM trajectory generation, state estimation, and constraint handling into a receding-horizon optimization problem. The 2D rigid surfaces are enclosed using minimum bounding ellipses (MBEs), while an adaptive Kalman filter (AKF) captures and predicts obstacle dynamics, propagating these estimates into the MPC-HOCBF for rapid avoidance maneuvers. Evaluation is conducted using a PX4-powered Clover drone Gazebo simulator and real-time experiments involving a COEX Clover quadcopter equipped with a LiDAR sensor.
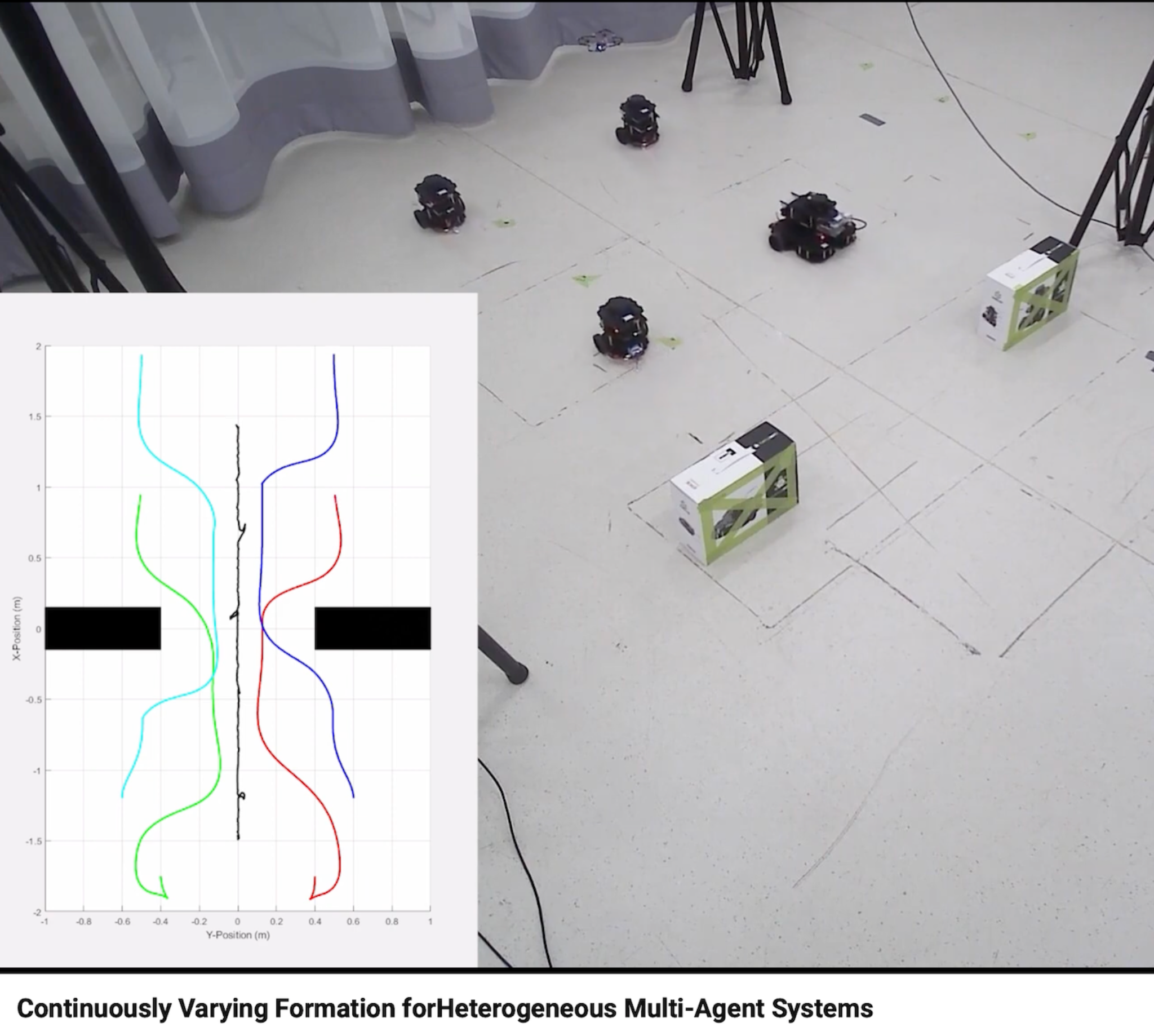
Project: Continuously Varying Formation for Heterogeneous Multi-Agent Systems
Paper: R. Adderson and Y. J. Pan, Continuously Varying Formation for Heterogeneous Multi-Agent Systems with Novel Potential Field Avoidance, IEEE Transactions on Industrial Electronics, Vol. 72, No. 2, pp. 1774-1783, Feb. 2025, DOI: 10.1109/TIE.2024.3429620.
This project presents a novel approach to time-varying formation for heterogeneous multi-agent systems (MASs), and using a novel artificial potential field (APF) algorithm for collision and obstacle avoidance. For a team of agents, a set of formations are designed for the use-case, and based on the circumstances for the system, the formation can be adjusted over a continuous spectrum of possible formations. This is done as a means of minimizing the amount of changing required in order for the formation to maneuver through an unknown environment. For obstacle avoidance, a modification to classical potential fields is implemented which utilizes the agent’s heading, velocity, and other parameters to provide a better optimized avoidance algorithm. Terminal sliding mode controllers are proposed for the control of the individual agent in the team. These are validated in both simulations and experiments for a team of quadrotor and mobile robots.
Human Robot Interaction
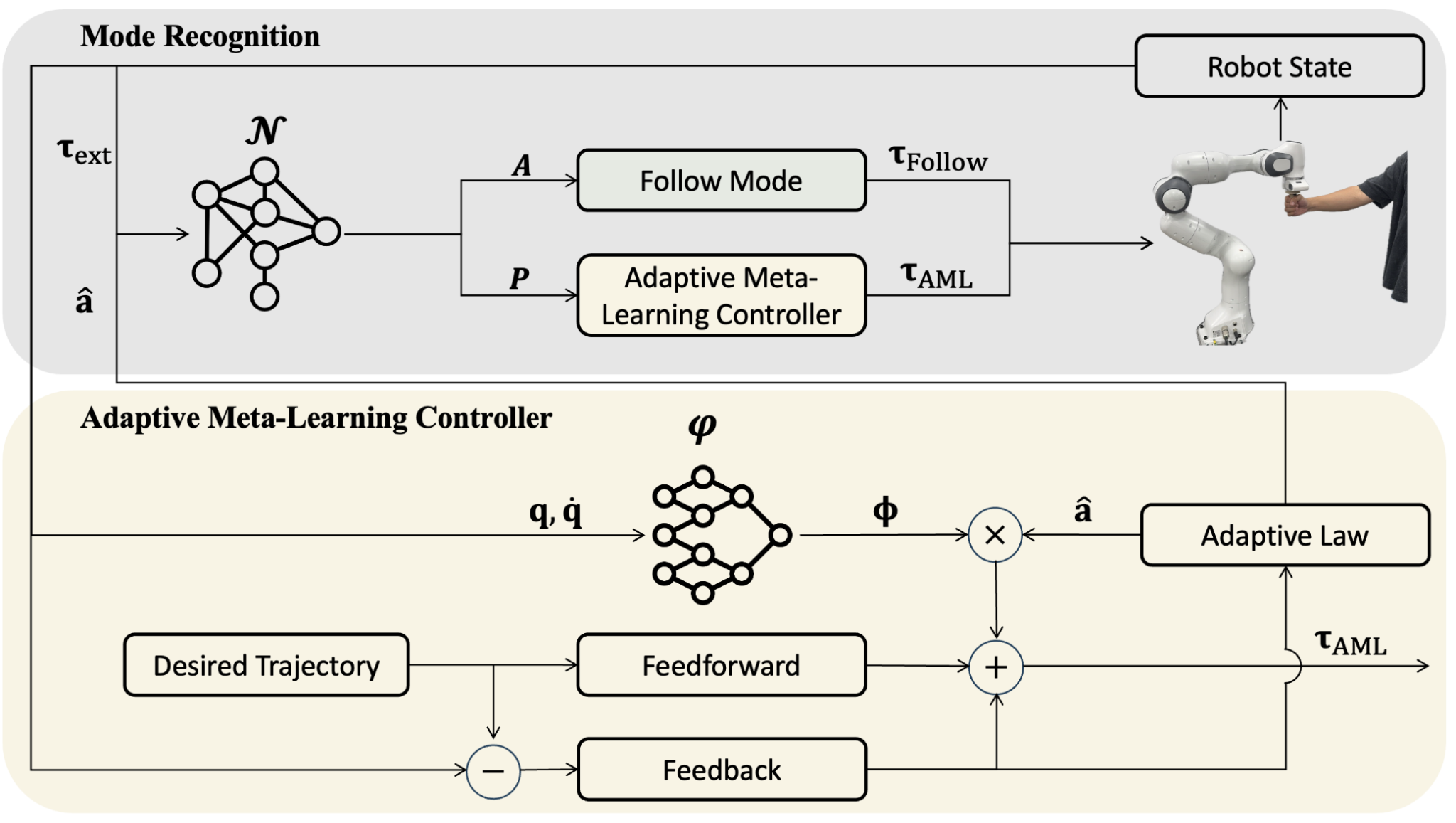
Project: Human-Robot Interaction via Meta-Learning based Mode Recognition and Adaptive Control
Paper: N. Chen and Y.J. Pan. Human-Robot Interaction via Meta-Learning Based Mode Recognition and Adaptive Control, IEEE/ASME Transactions on Mechatronics, Submitted 2025.
This work presents a learning-based framework for physical human-robot interaction (HRI) that enables a robotic manipulator to switch between active and passive control modes according to human intention. Traditional switching approaches rely on manually defined thresholds, which are typically task-specific and highly sensitive to noise, thereby limiting their generalization and robustness. To address these limitations, a neural network (NN) trained via meta-learning is employed to recognize human intention from interaction signals and autonomously determine the robot’s control mode. Furthermore, an adaptive meta-learning controller is developed to compensate for external disturbances. A multiple-trajectory meta-learning algorithm is proposed to jointly train an environment-basis NN and a force-dependent parameter, enabling the controller to capture unmodeled dynamics and adapt online to varying interaction forces. Experimental evaluations on position-tracking and HRI tasks demonstrate that the proposed framework achieves robust and accurate control performance while enabling intuitive and reliable mode recognition, showing strong potential for safe and adaptive physical HRI.
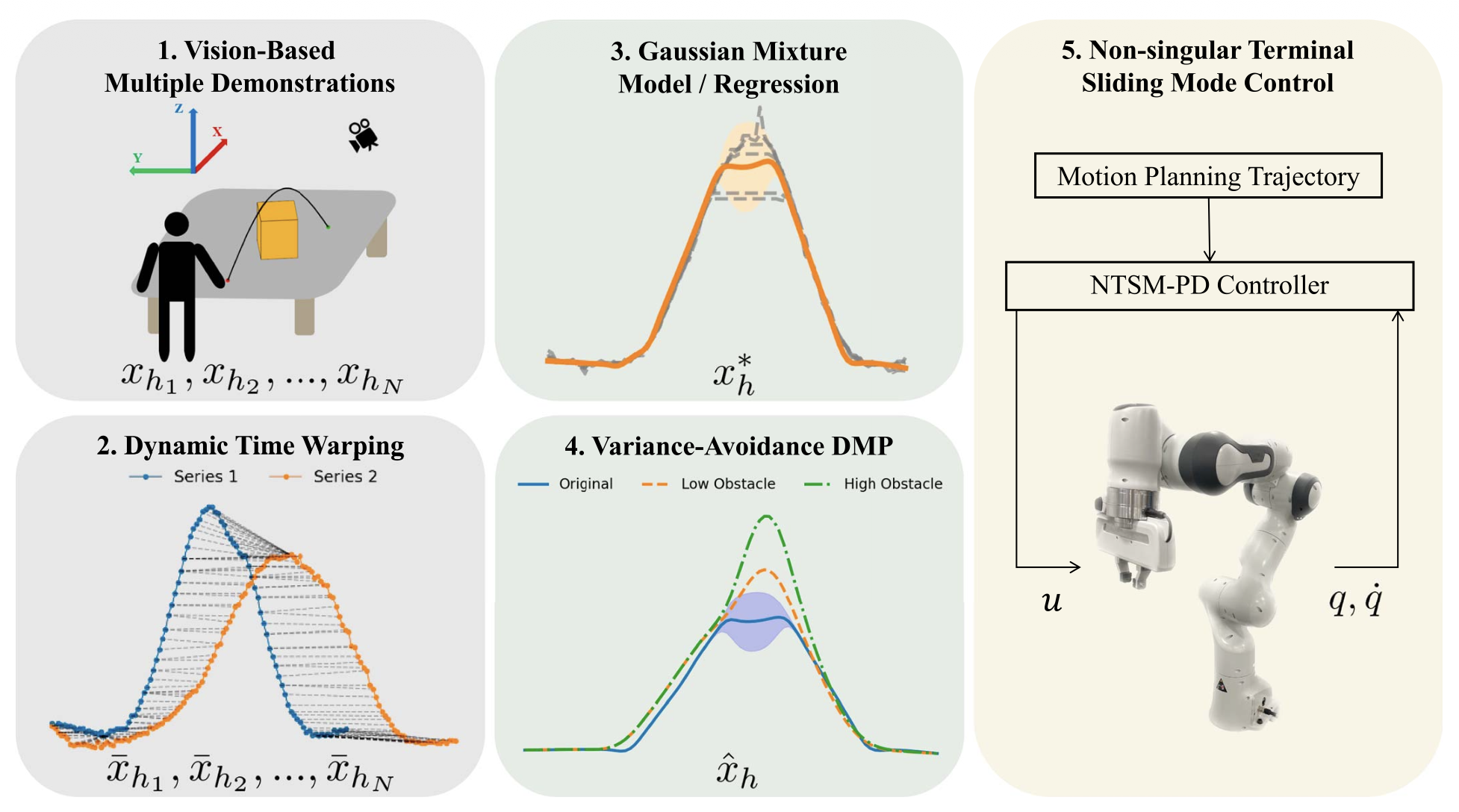
Project: Vision-Based Dexterous Motion Planning by Dynamic Movement Primitives with Human Hand Demonstration
Paper: N. Chen, L. Wan and Y.J. Pan, Robust and Adaptive Dexterous Manipulation with Vision-Based Learning from Multiple Demonstrations, IEEE Transactions on Industrial Electronics, Vol.72, No. 6, 2025, pp. 6465-6473, DOI: 10.1109/TIE.2024.3503610.
In this project, we propose a vision-based learning-from-demonstration framework for a seven-degree-of-freedom (7-DOF) robotic manipulator. This framework enables learning from multiple contact-free human-hand demonstrations to execute dexterous pick-and-place tasks. Conventional methods for collecting demonstration data involve manually and physically moving the robot. These methods can be cumbersome, lack dexterity, and be physically straining. We leverage MediaPipe software, dynamic time warping (DTW), and Gaussian mixture model/regression to capture and regress multiple dexterous and marker-less hand motions. The proposed approach results in a more comprehensive motion representation, simplifying multiple demonstrations, and mitigating the non-smoothness inherent in single demonstrations. A novel dynamic movement primitives (DMP) with a variance-based force coupling term are developed to adaptively assimilate human actions into trajectories executable in dynamic environments. By considering the estimated variance from demonstration data, the DMP parameters are automatically fine-tuned and associated with the nonlinear terms to adapt the trajectories. To compensate for unknown external disturbances, non-singular terminal sliding mode (NTSM) control is applied for precise trajectory tracking. Experimental studies demonstrate the performance and robustness of our framework in executing demonstrations, motion planning, and control for a pick-and-place task.
Collaborative Robots
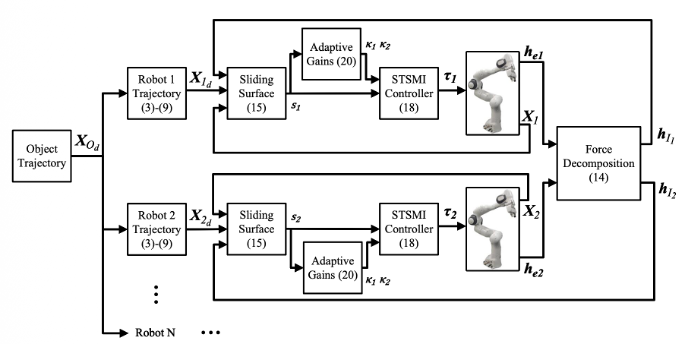
Project: Adaptive Super-Twisting SMC Impedance Control for Cooperative Multi-Robot Manipulation
Paper: L. Wan and Y.J. Pan, Adaptive Super-Twisting Sliding Mode Impedance Control for Cooperative Multi-Robot Manipulation, In Proceedings of the 51st Annual Conference of the IEEE Industrial Electronics Society, Madrid, Spain, Oct. 2025.
Cooperative multi-robot manipulation requires control strategies that achieve precise object trajectory tracking and minimize internal object forces under model uncertainties and external disturbances. This work proposes a distributed adaptive super-twisting sliding mode impedance (STSMI) control framework for cooperative manipulation. The approach integrates adaptive super-twisting sliding mode control with impedance-based force regulation in task space to ensure robustness, compliance, and stability. Quaternion-based control ensures smooth and stable orientation tracking. The proposed controller balances tracking accuracy and internal force minimization compared to conventional controllers. Simulation results with two 7-degree-of-freedom (DOF) manipulators show improved tracking accuracy, reduced internal forces, and adaptability to various configurations. Experimental validation confirms the controller’s robustness and real-world applicability.
Project: An Optimal Task Planning and Agent-aware Allocation Algorithm in Collaborative Tasks
Paper: Q.G. Chen and Y.J. Pan, An Optimal Task Planning and Agent-aware Allocation Algorithm in Collaborative Tasks Combining with PDDL and POPF, IEEE Transactions in Industrial Electronics, Under Review, 2025.
In the context of Industry 4.0, integrating artificial intelligence into manufacturing enables the development of smart factories that enhance efficiencies through automation and human-robot collaboration. This paper presents a flexible and adaptive framework for task planning and allocation in smart factories. The proposed system uses the Planning Domain Definition Language (PDDL) in conjunction with the Partial Order Planning Forwards (POPF) task planner integrated with a novel task allocation algorithm. The allocation algorithm assigns tasks to agents based on a cost function considering feasibility, reachability, overlapping workspace, and cooperation. Experimental validation is performed using two robotic manipulators and a human worker in real-time assembly tasks, demonstrating the effectiveness and feasibility of the approach. The results highlight the system’s capacity to replace rigid, hardcoded production line plans with dynamic and adaptive task planning, laying the foundation for future enhancements in smart manufacturing systems.
Robot Manipulation and Grasping
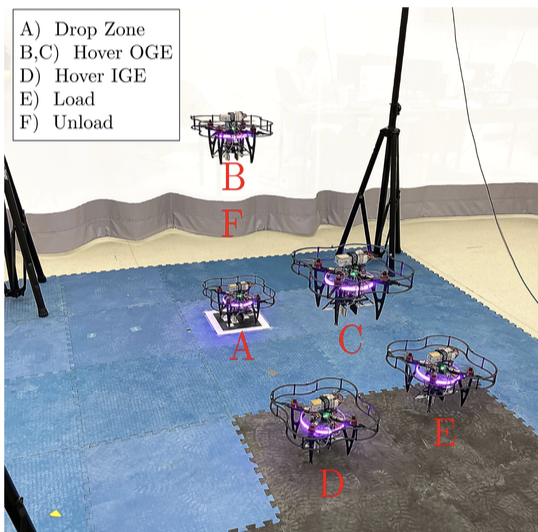
Project: Adaptive Observer-Based Super-Twisting SMC for Low Altitude Quadcopter Grasping
Paper: S. Smith and Y.J. Pan, Adaptive Observer-based Super-twisting Sliding Mode Control for Low Altitude Quadcopter Grasping, IEEE/ASME Transactions on Mechatronics, Vol.30, No.1, pp. 587-598, Feb 2025, DOI: 10.1109/TMECH.2024.3400871.
This work offers an improved robust altitude control solution for an unmanned aerial vehicle (UAV) load grasping system at low altitude under ground-effect and varying loads. We propose a novel technique for adaptive gain selection of the higher-order sliding mode observer (HOSMO). The adaption rate is proportional to the absolute value of the errors computed between the real noisy position measurements and their estimation provided by the observer. In addition, it can adjust to bidirectional disturbance bounds found in UAV grasping applications to avoid overestimation of the gains. The disturbance observer is integrated with a super-twisting sliding mode controller to achieve robust altitude control, effectively attenuating the chattering phenomenon. Moreover, disturbance-based gain conditions are avoided because of the adaptive law for the HOSMO. System stability and finite-time convergence of the adaptive HOSMO are investigated using Lyapunov theory, even in the presence of Lebesgue-measurable noise. Validation is performed through multi-stage simulations using a PX4-powered Clover drone Gazebo simulator and real-time experiments involving low-altitude pick-and-place scenarios with a COEX Clover drone equipped with a rigid gripper mechanism.
Project: Adaptive Task Space Non-Singular Terminal Super-Twisting SMC of a 7-DOF Robotic Manipulator
Paper: L. Wan, S. Smith, Y.J. Pan and E. Witrant, Task Space Adaptive Non-Singular Terminal Super-Twisting Sliding Mode Control of a 7-DOF Manipulator, IEEE Transactions on Industrial Electronics, In Press, August 2025, DOI: 10.1109/TIE.2025.3600520.
This paper presents a new task-space Nonsingular Terminal Super-Twisting Sliding Mode (NT-STSM) controller with adaptive gains for robust trajectory tracking of a 7-DOF robotic manipulator. The proposed approach addresses the challenges of chattering, unknown disturbances, and rotational motion tracking, making it suited for high-DOF manipulators in dexterous manipulation tasks. A rigorous boundedness proof is provided, offering gain selection guidelines for practical implementation. Simulations and hardware experiments with external disturbances demonstrate the proposed controller’s robust, accurate tracking with reduced control effort under unknown disturbances compared to other NT-STSM and conventional controllers. The results demonstrated that the proposed NT-STSM controller mitigates chattering and instability in complex motions, making it a viable solution for dexterous robotic manipulations and various industrial applications.
Project: Model-Agnostic Meta-Learning Inspired Adaptive Control Framework for Unknown Payload Picking
Paper: N. Chen and Y.J. Pan, Model-Agnostic Meta-Learning Inspired Adaptive Control Framework for Unknown Payload Picking, In Proceedings of the 51st Annual Conference of the IEEE Industrial Electronics Society, Madrid, Spain, Oct. 2025.
This work presents a model-agnostic meta-learning (MAML) inspired training framework for a 7-degree-of-freedom (7-DOF) robotic manipulator, equipped with an adaptive controller to perform an object-picking task with unknown payload. Machine learning frameworks typically require large amounts of training data. While traditional meta-learning methods can adapt neural network (NN) parameters with only a few new samples, these approaches are still not fast enough for real-time robotic control tasks. To address this, a task-dependent coefficient is trained to represent the payload, and an adaptive controller is developed to adjust this coefficient in real time. A MAML inspired training algorithm is employed to produce a task-independent neural network that models all unmodeled disturbances. In this study, 10 objects of different weights are used for training, and the manipulator is tested with unknown and new payload. Simulations are conducted to demonstrate the effectiveness of the proposed training and control framework.
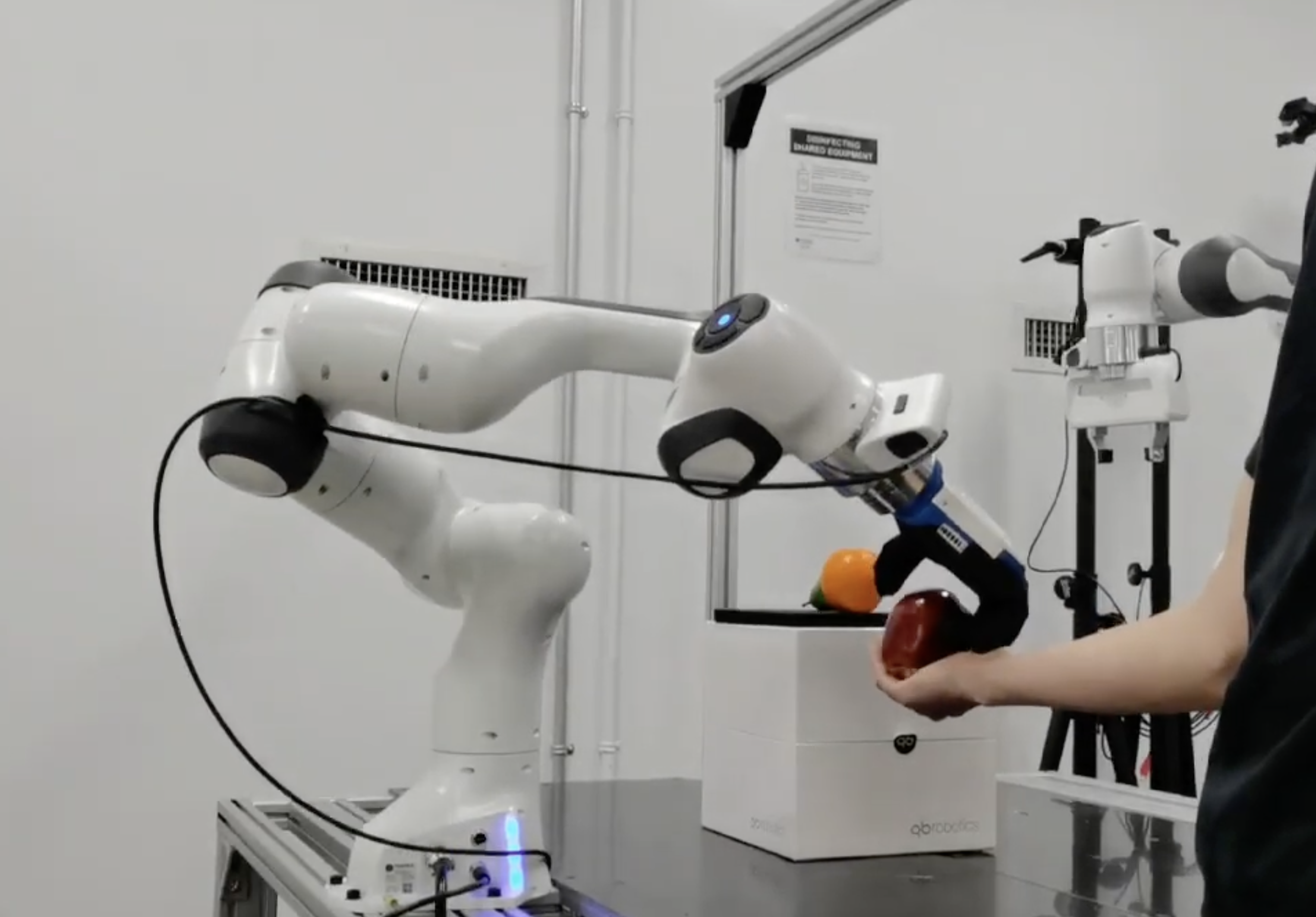
Project: Vision-based Control for a 7-DOF Robotic Manipulator with Softhand for Grasping and Handover Tasks
Paper: Q.G. Chen, L. Wan and Y.J. Pan, Robotic Pick-and-Handover Maneuvers with Camera-based Intelligent Object Detection and Impedance Control, Transactions of the Canadian Society for Mechanical Engineering, Vol.47, No.4, pp. 486-496, 2023, DOI: 10.1139/tcsme-2022-0176.
Vision-based Navigation
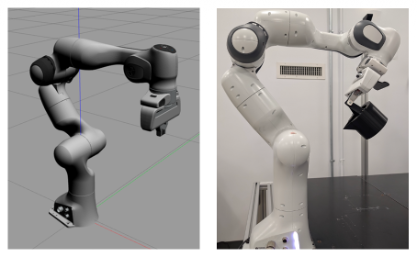
Project: An Integrated iGPMP2 and iSDF Framework for Robotic Manipulator Motion Planning
Paper: S. Buchanan, Y.J. Pan and R. Bauer, Journal Paper, “An Integrated iGPMP2 and iSDF framework for robotic manipulator motion planning”, IEEE Transactions on Systems, Man, and Cybernetics: Systems, Nov. 2025.
Industrial robotic manipulators are increasingly being integrated into unpredictable and, at times, dynamic environments. This work presents a framework that integrates the optimization-based motion planner called incremental Gaussian Process Motion Planner 2 (iGPMP2) with a neural network-base environment estimation module called incremental Signed Distance Field (iSDF). Improvements are proposed to iSDF that extend its use to partially-unknown semi-dynamic environments through identification and removal of outdated and conflicting keyframes. A partially-unknown semi-dynamic environment refers to a static, previously-known environment that has undergone a significant change. The proposed improvement to iGPMP2 is a parameter modification law which improves collision avoidance and trajectory efficiency without requiring prior knowledge of the environment. Integration of iSDF with iGPMP2 involves maximizing the optimization performance of both modules through the use of separate training and inference neural networks. Validation simulations and experiments are carried out to show the effectiveness of the proposed approach in three partially-unknown environments using a Franka Emika 7-DoF robotic manipulator with a camera-in-hand Intel RealSense D435i RGB depth camera.
Autonomous Sailboat
Project: Adaptive Robust Heading Control and Nonlinear Model Predictive Control of an Autonomous Sailboat
Paper: S. Smith, E. Witrant and Y.J. Pan, Adaptive Robust Heading Control of an Autonomous Sailboat, IEEE Journal of Oceanic Engineering, Under Review, 2025.
Paper: J. Z. Wu, Y.J. Pan, C. Shen, S. Smith, and E. Witrant, Nonlinear Model Predictive Control for Autonomous Sailboat with Optimization of Sail Angle, The 2024 OCEANS Conference and Exposition, Sept 2024, Halifax, Canada.
Paper: S. Smith, E. Witrant and Y.J. Pan, High-Precision Heading Control of an Autonomous Sailboat: a Robust Nonlinear Control Approach, The 2024 OCEANS Conference and Exposition, Sept 2024, Halifax, Canada.
Project: Automatic Sail: AI-Driven Optimization for Sustainable Maritime Navigation and Wind-Assisted Propulsion
Shipping accounts for 2.9% of global CO2 emissions, with a potential increase of 44% by 2050. To address this issue, shipping industry and the European Commission promote an increasing use of wind-assisted propulsion solutions, such as rotor sails and inflatable sails. However, there is limited research on real-time adaptive control strategies for sail propulsion. Our project leverages data science and AI to optimize sail adaptation and autonomous navigation for maritime transport. AutoSail aims to improve the energy efficiency of sailing ships and reduce emissions by developing safe, high-performance control and AI methods for wind-assisted propulsion (WAP), experimental validation, and autonomous sailing. It addresses modeling and FSI, control for infinite-dimensional systems, and AI-enabled autonomy.
The project is co-funded by supported by the Natural Sciences and Engineering Research Council of Canada (NSERC) and French National Research Agency (ANR) in France. The equipments are as follows. The sailboat in the left figure is Birdie which is a full-scale instrumented experimental sailboat and the right figure shows the small scale DragonFlite 95 — RC-scale ASV.


Recent Talks
Keynote Talk, Intelligent Adaptive Robot Interacting with Unknown Environment and Human, the 2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS’2025), Hangzhou, China, October 2025.
Plenary Talk, Intelligent Adaptive Control: from Autonomous Systems to Human-Robot Interaction, the CSME-CFDSC-CSR 2025 International Congress, Montreal, QC, Canada, May 2025.
Invited Talk, Intelligent Adaptive Control: from Autonomous Systems to Human-Robot Interaction, Workshop at the University of Agder, Grimstad, Norway, June 2025.
Keynote Talk, Advanced Control for the Teleoperation of a Multi-Robot Team and its Human-Robot Trust, Multilateral Teleoperation Workshop, IEEE International Conference on Robotics and Automation - ICRA, Atlanta, USA, May 2025.
Invited Talk, How WIE could embrace the challenge of leadership and career development at high-tech, NGO CSW Forum 68, United Nation Parallel Session, March 15th, 2024
Plenary Talk, Effective Cooperation with Intelligent Adaptive Robots, The 10th IEEJ international workshop on Sensing, Actuation, Motion Control, and Optimization (SAMCON), Kyoto, Japan, Mar 3rd, 2024.
Keynote Talk, Advanced Robust Control Strategies for Cooperative Multi-Robot Systems, The 2024 16th IEEE/SICE International Symposium on System Integration - SII, Ha Long Bay, Vietnam, Jan. 10th, 2024.
Invited Talk, Advances in Telerobotics and Applications, CSME Webinar – Distinguished Lecture Series, Jan. 2023.
Keynote Talk, Cooperative Robotic Systems: Challenges, Control and Applications, the 2022 CSME International Congress of Canadian Mechanical Engineering, Edmonton, AB, Canada, June 2022.
Keynote Talk, Cooperative Robotic Systems, Women-in-Engineering workshop, The 23rd IEEE International Conference on Industrial Technology (ICIT 2022), Shanghai, China, August 2022.